Current Funded Research Projects
Multi-functional Robotic Assistive Arm (mR2A) for Activities of Daily Living Assistance (Funded by DHHS/NIDILLRR, 90DPGE0018; 09/01/20 – 08/31/2023)
Individuals with Upper or Lower Extremities (ULE) Dysfunction (IwULED) resulting from a spinal cord injury (SCI), amyotrophic lateral sclerosis (ALS), Cerebral Vascular Accident (CVA), trauma, and occupational injuries, this research focuses on the development of a multifunctional robotic assistive arm (mR2A) for activities of daily living (ADL) assistance such as feeding, opening a door, picking an object from out of reach of such IwULED, etc.![]()

Figure 3: Current developed prototype.

Figure 4: Current developed prototype.
Video 1: Picking objects from the ground using Finger Joystick Control.
Video 2: Picking objects from tables using Chin Joystick Control.
Video 3: Picking and eating fruits/food using Eye-Gaze Control.
Video 4: Working prototype.
Video 3: Working prototype controlling with joystick.
We hypothesize that the proposed mR2A will significantly improve the quality of life of IwULED, improve their mobility, and provide independence.
A Wheelchair Mounted Upper Limb Exoskeleton Robot for Rehabilitation and ADL Assistance
The project focuses on the study of upper limb (UL) biomechanics, and the development of a Wheelchair Mounted Exoskeleton Robot for Rehabilitation and Activities of Daily Living (ADL) Assistance for Individuals with Upper and/or Lower Extremities Dysfunctions (ULED) resulting from various neurological conditions and/or orthopedic injuries.
 |
 |
Fueled by team’s (researchers of the BioRobotics Lab, UWM) expertise in assistive and rehabilitation robotics and controls, a novel 7 degrees of freedom (DoFs) exoskeleton robot (SREx) has been developed. SREx can provide following therapeutic exercises to upper limb: (a) continuous passive motion, (b) active-assist, (c) variable resistive (d) patient specific therapies. Oncoming development includes: (i) mobility assistance via a wheelchair and an assistive robotic exoskeleton mounted on it; (ii) exercise and rehabilitation assistance not only in clinical settings but also at home; and (iii) support for those individuals to live independently by assisting in ADL whether it may be at home, shops or even workplaces. Video demonstration can be found here.
Symbiotic Modular Therapeutic Robot
The research conducted under this project will directly contribute to transform a developed upper limb rehabilitative exsokleton with dual funationality and ergonomic shoulder into a modular therapeutic robot (mTRob) as shown in figure 1.
 This innovative research provides both exoskeleton robot (ER) and end-effector robot (EER) functionality in mTRob and will incorporate intelligent control algorithms (iCA) on the basis of quantitative assessment of patients’ physiological conditions. Robotic devices (RDs), either ER or EER type, are one of the novel and rapidly expanding technologies in upper extremity (UE) rehabilitation. Existing upper limb robots perform either joint-based exercises (exoskeleton-type functionality) or end-point exercises (end-effector-type functionality). Patients may need both kinds of exercises, depending on the type, level, and degree of impairments.
This innovative research provides both exoskeleton robot (ER) and end-effector robot (EER) functionality in mTRob and will incorporate intelligent control algorithms (iCA) on the basis of quantitative assessment of patients’ physiological conditions. Robotic devices (RDs), either ER or EER type, are one of the novel and rapidly expanding technologies in upper extremity (UE) rehabilitation. Existing upper limb robots perform either joint-based exercises (exoskeleton-type functionality) or end-point exercises (end-effector-type functionality). Patients may need both kinds of exercises, depending on the type, level, and degree of impairments.
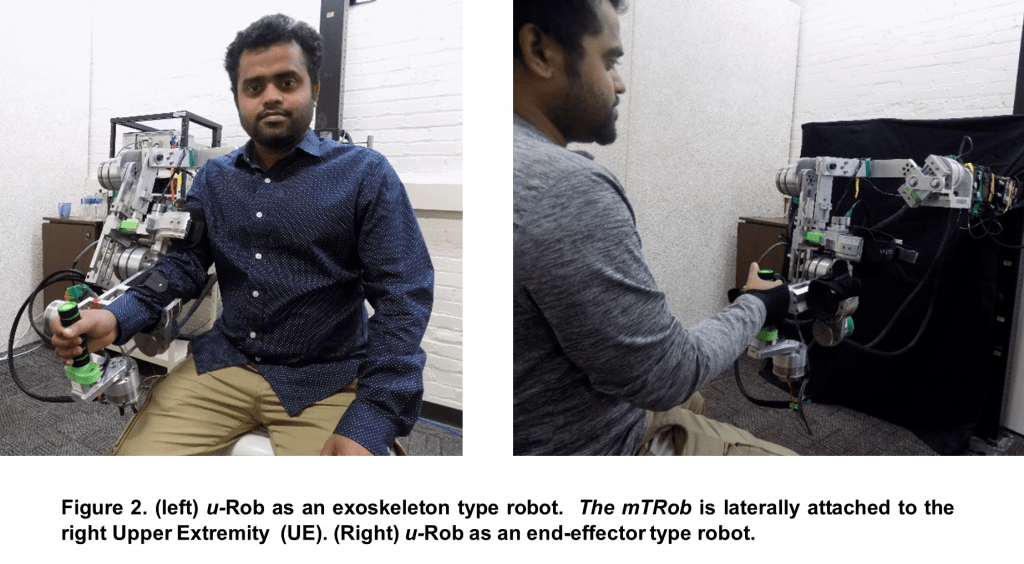 To bridge this gap, in this research, a seven-degrees-of-freedom (DoFs) upper-limb rehabilitation robot called ‘u-Rob’ as shown in figure 2 that functions as both exoskeleton and end-effector types device has already been developed. Unlike existing RDs, it has been designed with personalized paradigms so the therapist can easily personalize the activities and exercises. To provide patient-tailored therapy, the developed rehabilitation system will incorporate intelligent control algorithms on the basis of quantitative assessment of patients’ physiological conditions (e.g. interaction forces, EMG, EEG and so on). We have submitted one invention disclosure (Tech ID 1579) related to the proposed innovation to the UWM Research Foundation. This project has produced 4 journals and a book chapter. We expect this project will further lead to 2-3 journal publications. Currently one PhD Student (Md Mahfuzur Rahman Khan) is working on this project.
To bridge this gap, in this research, a seven-degrees-of-freedom (DoFs) upper-limb rehabilitation robot called ‘u-Rob’ as shown in figure 2 that functions as both exoskeleton and end-effector types device has already been developed. Unlike existing RDs, it has been designed with personalized paradigms so the therapist can easily personalize the activities and exercises. To provide patient-tailored therapy, the developed rehabilitation system will incorporate intelligent control algorithms on the basis of quantitative assessment of patients’ physiological conditions (e.g. interaction forces, EMG, EEG and so on). We have submitted one invention disclosure (Tech ID 1579) related to the proposed innovation to the UWM Research Foundation. This project has produced 4 journals and a book chapter. We expect this project will further lead to 2-3 journal publications. Currently one PhD Student (Md Mahfuzur Rahman Khan) is working on this project.
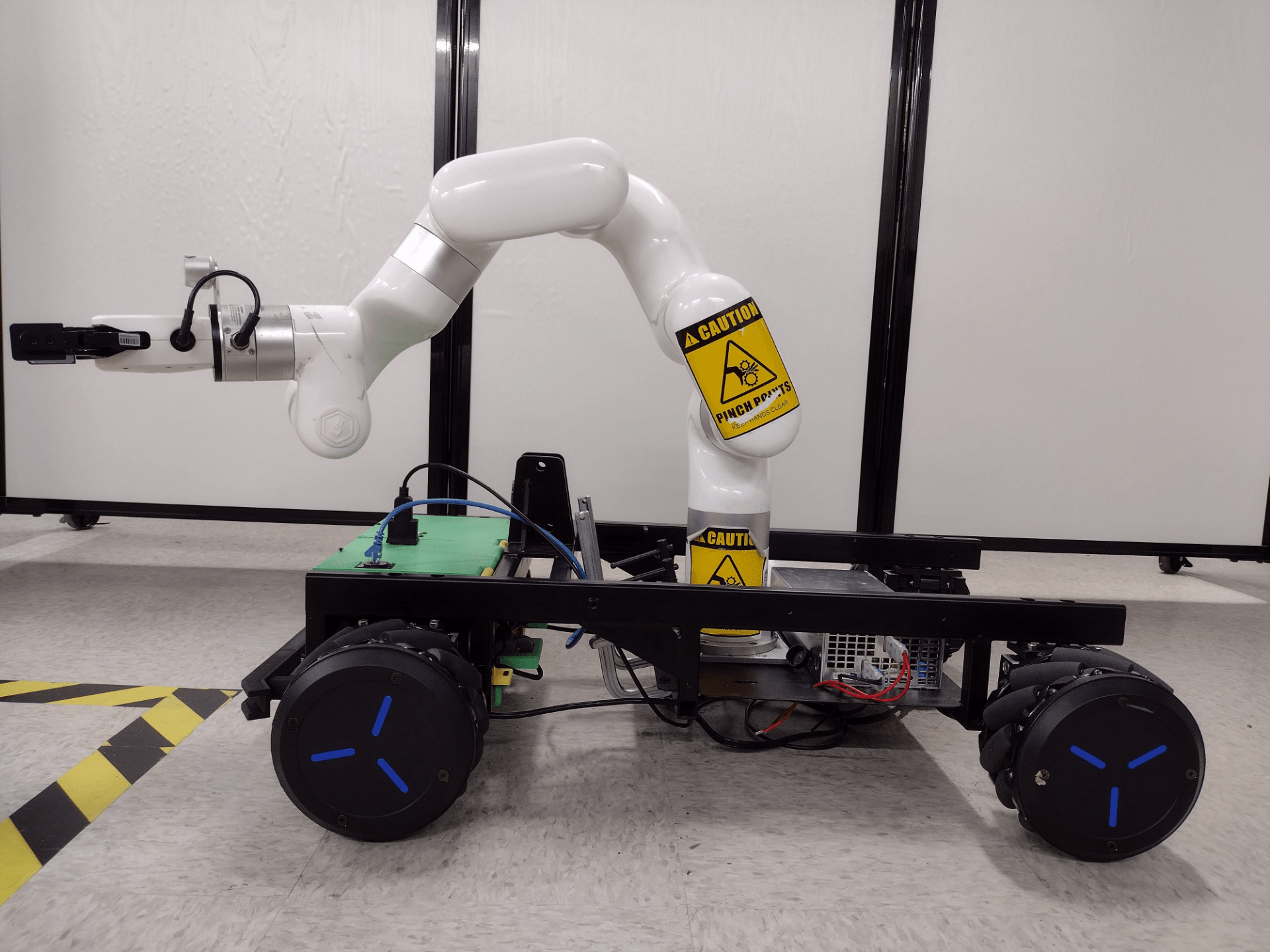
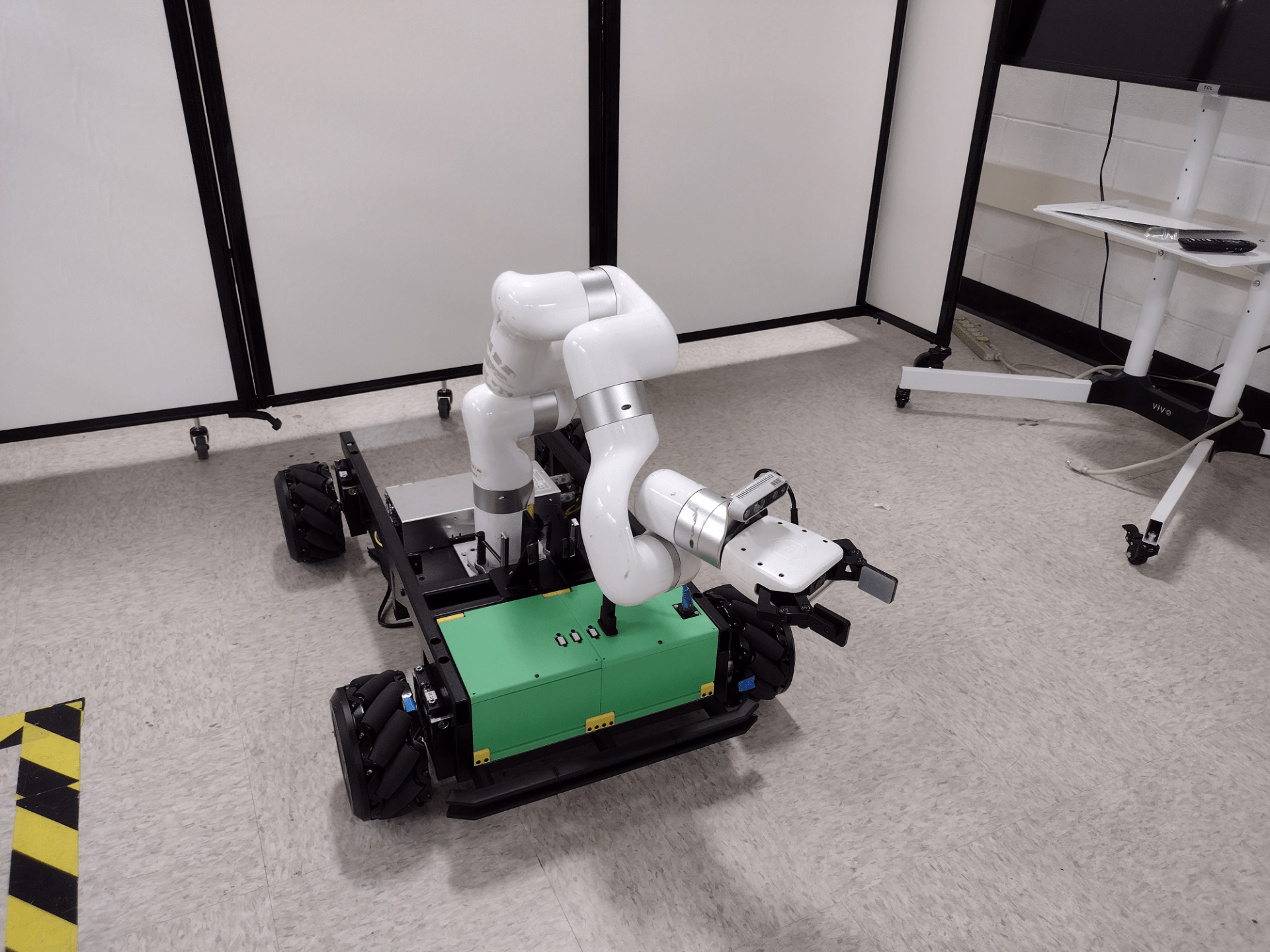
NASA-Wisconsin Space Grant Consortium, Research Infrastructure Program, Adaptive Coordinated Control of Multiple Mobile Manipulator Robots: An Analog of Multi-Robot Planetary Exploration (NASA Training Grant #NNX15AJ12H, 06/01/2020 – 03/31/2021)
Mobile robots operating in teams will be instrumental in extending human reach in planetary exploration. To contribute in this area, in this research, we propose an adaptive control for a team of mobile manipulator robots transporting rigid and/or flexible objects cooperatively under unknown parameters and disturbances.
Video 1: Multiple MMR handling a flexible object.
In recent years, mobile manipulators have attracted many researchers because of their combined manipulation and locomotion ability. In this project, we consider a robotic manipulator attached to a nonholonomic mobile platform, which can be used in planetary exploration and/or in various applications in modern factories.
Smart Hand and Wrist Rehabilitation Device (SHWRD)
This research focuses on developing a smart hand rehabilitation device (SHRD) that can provide a wide variety of hand exercises and can be used at home/clinic. SHRD is a hybrid exoskeleton-based device with a novel compliant mechanism worn at the user’s hand, like wearing hand gloves.
 Currently, this device can provide passive exercises to the hand by generating isolated digit motion, isolated digital joints’ motion, digits’ combined motion, and composite motion of digital joints. These exercises can be continuous or programmed according to users’ needs guided by therapists. The oncoming development of SHRD includes implementation of active exercises and active assist exercises of hand. Our long-term goal is to develop a reliable, easy to use, SHRD that is portable, cost-efficient, with an LCD of exercises, graphics (quantitative progress measurement), and an accompanying smartphone app that includes (i) voice control of the device, (ii) feedback from a remote expert (e.g., an occupational therapist (OT)), and (iii) patient progress tracking. It will be suitable for use in the home and/ or routine clinical practice. Video demonstration can be found here.
Currently, this device can provide passive exercises to the hand by generating isolated digit motion, isolated digital joints’ motion, digits’ combined motion, and composite motion of digital joints. These exercises can be continuous or programmed according to users’ needs guided by therapists. The oncoming development of SHRD includes implementation of active exercises and active assist exercises of hand. Our long-term goal is to develop a reliable, easy to use, SHRD that is portable, cost-efficient, with an LCD of exercises, graphics (quantitative progress measurement), and an accompanying smartphone app that includes (i) voice control of the device, (ii) feedback from a remote expert (e.g., an occupational therapist (OT)), and (iii) patient progress tracking. It will be suitable for use in the home and/ or routine clinical practice. Video demonstration can be found here.
Intelligent Therapeutic Robot (iTbot)
This research contributes to developing an Intelligent Therapeutic Robot (iTbot) designed to provide therapy to patients with upper limb impairment due to stroke, injury, and other trauma. This robot aims to implement robotic rehabilitation based on principles of motor rehabilitation and Neuroplasticity. The iTbot can be configured in the horizontal and vertical plane to provide rehab therapy in the whole range of workspace. This 2 DoFs end-effector type robot is a new device focused on operating at multiple manually selectable orientations to implement a wide range of robot-aided rehabilitation therapies in a minimum viable design. It can provide passive, active, and active-assisted rehabilitation therapies to patients with limited upper limb mobility. The main contribution of this research is the design and development of 2-DoF portable (benchtop mount) and multiple manually selectable orientation end-effector type robots for upper limb rehabilitation in a minimum viable design fashion.

Figure 1: Vertical (left) and Horizontal (right) configuration of the iTbot
Video 1: Robotic rehabilitation using iTbot.
Development of a Novel Telemanipulation Framework for Human-Robot Collaboration using PTC ThingWorx and Vuforia Studio
The developed tele-manipulation framework for human‐robot collaboration can be used to provide various tele-rehabilitation exercises to individuals with upper‐limb impairment. Several state of the art technologies were utilized, including the PTC ThingWorx IIoT platform, Vuforia Studio Augmented Reality platform, PTC ThingWorx experience services, and Vuforia View app on iPad. Modes are introduced to provide passive arm movement therapy with an end‐effector type robot, xArm‐5. To provide resistive therapy, impedance control was used and experimentally validated.
A Novel Framework for Mixed Reality–Based Control of Collaborative Robot: Development Study
Collaborative robots and their applications have a magnificent impact in the rehabilitation and teleoperation fields. A framework for collaborative robots is very much needed to meet the demands of collaborative robots. The proposed mixed reality–based framework for collaborative robots can be used for different telehealth applications such as teleoperation and telerehabilitation and can guide other researchers to conduct further studies for the advancement of humans. Several state-of-the-art technologies were used while developing the framework, including Unity, WMR platform, Azure mixed reality services, and HoloLens 2. The framework is validated by conducting a comprehensive, collaborative experiment using a 5-DoF collaborative robot (xArm-5) in a mixed reality environment.
Lower Limb Exoskeleton Robot Passive exercise with predefined trajectory
This Project focuses on the study of Lower Limb (LL) biomechanics, and the development of a Bed Mounted Exoskeleton Robot named LLRR-Lower Limb Rehabilitation Robot, for Rehabilitation for Individuals with Lower Extremities Dysfunctions resulting from various neurological conditions and/or orthopedic injuries.
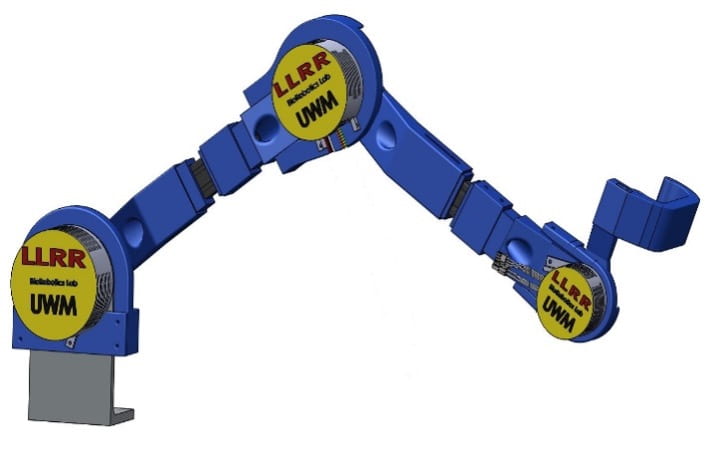
A team’s (researchers of the BioRobotics Lab, UWM) expertise in assistive and rehabilitation robotics and controls, a novel 3 degrees of freedom (DoFs) exoskeleton robot (LLRR) has been developed.
The LLRR can provide following therapeutic exercises to Lower limb:
- Continuous passive motion
- Active assist
- Variable resistive
- Patient specific therapies
Adaptive and Robust Tracking Controller for Holonomic Mobile Robots using Reinforcement Learning
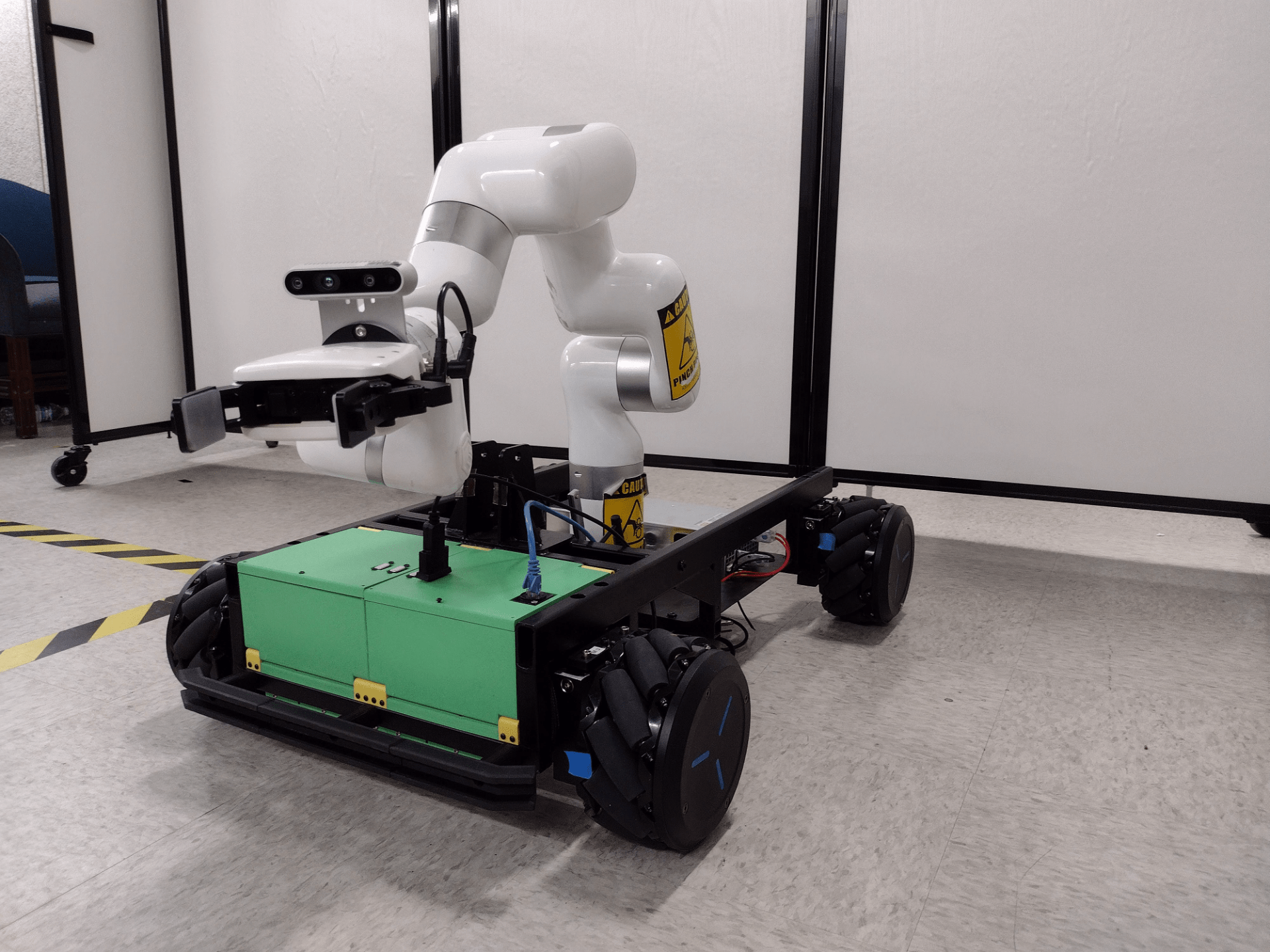
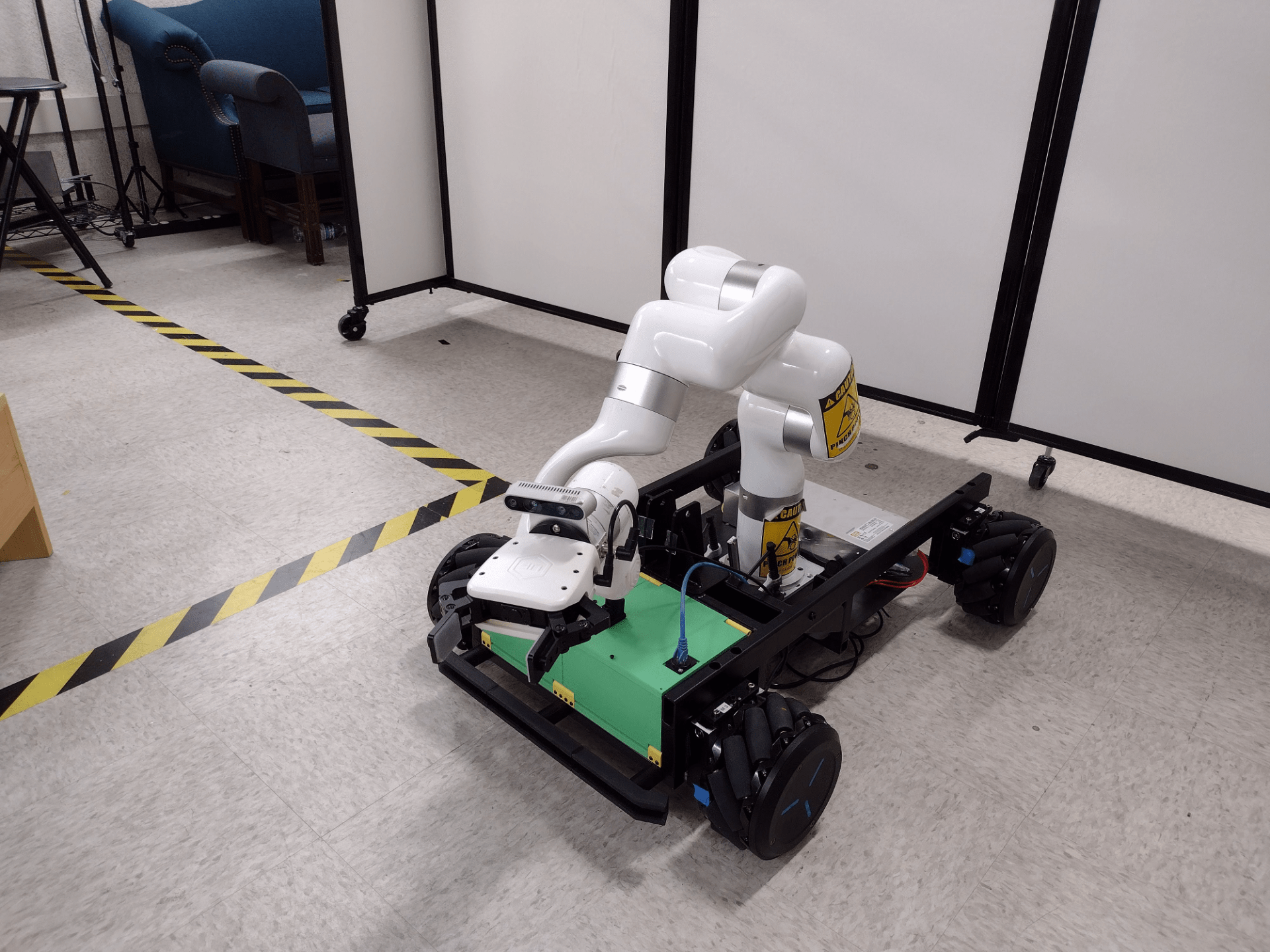
Holonomic Mobile Robots (HMRs) offer increased flexibility in omnidirectional movement, enabling complex maneuvering in restricted spaces, improved performance, and efficient use in various industries. Mecanum Wheeled Mobile Robots (MWMRs) face unique challenges like complex wheel arrangements, traction control on rough terrains, and high-dimensional state spaces, making them prone to instability. Recent trends in machine learning (ML) based mobile robot control, such as Reinforcement Learning (RL), show significant performance improvements in complex environments. However, RL-based HMR control faces challenges like the need for large amounts of training data, computational resources, and real-time output.
 |
 |
 |
 |
This project aims to design and develop a non-linear adaptive and robust controller for MWMRs, enabling path planning and autonomous control while avoiding obstacles. The project will follow a systematic approach, including System Modeling, Controller Designing, Simulation and Testing, and Implementation. The controller will compensate for the robot’s non-linear dynamics and environmental uncertainties and be tested for obstacle avoidance, trajectory following, and precise control in nonlinear motion.
The MWMR platform will consist of four individually actuated omnidirectional wheels (RoboCT CTM300-7) with integrated servo drives (Copley IEL-060-15). The developed controller will be coded and communicated with the MWMR platform through an NVIDIA Jetson Nano Developer Kit. The project will require knowledge in robot manipulation, non-linear control theory, python programming, machine learning methods, reinforcement learning, and distributed computing.
Upon completion, the project will result in a robust and adaptive non-linear controller for MWMRs, powered by cyber infrastructure technology, contributing to the advancement of mobile robotics by enabling robots to navigate complex environments with greater flexibility and efficiency
Development of Intelligent Control Algorithm (iCA) based on EMG Signals
Besides the design limitations of existing rehabilitation devices (RD), the development of iCA to deliver patient-specific (PS), and/or impairment oriented (IO) therapy has largely been ignored. No RDs have existed that are intelligent enough to provide PS, and/or IO therapy. The goals of this project will be accomplished by developing an iCA on the basis of a quantitative assessment of the patient’s EMG, and interactive force with the robot. With the proposed iCA the mTRob will be able to (a) provide rehab exercises based on individuals’ level of impairments; (b) quantitatively assess the therapeutic progress and give feedback to the patients, and (c) change the active therapeutic exercises in real-time based on the patients’ progress. Currently one PhD Student (Mehran Rahmani) is working on this project. We expect this project will lead us 4-5 publications.
EMG and Kinematic Analysis of Human Upper Extremities During Activities of Daily Living
The purpose of this project is to statistically analyze the kinematics and the muscular activity of the dominant and nondominant upper-extremity (UE) while performing a variety of ADLs. We have carried out pilot studies with 10 healthy individuals. Future research includes experiments with individuals with limited UE movements. The research findings will be used to develop the proposed iCA. Currently multiple students (Rahmani M: PhD Student; Mohammed A, David C, Anthony DL, and Mitchell TM: Undergraduate students ) working on this project.
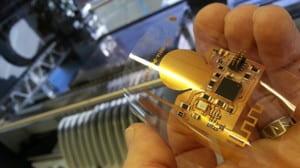
Flexible PCB Based Modular Inductive Proximity Sensor (02/21/2020)
Inductive proximity sensors are used to detect the presence of a metal object at precise distances. Current industrial sensors built with wire-wound coils have complicated manufacturing processes, bulky and fixed form factors. So we proposed a Flexible Printed Circuit (FPC) based coil with a ferrite shield on one side which can give virtually unlimited assembly configurations, enabling flexibility of form factor and can also be embedded in a co-bot’s construction by reducing of sensor’s physical size by 80%.
 |
 |
Figure 1: Flexible Printed Circuit (FPC) based modular inductive proximity sensor
Other Ongoing Funded Research Projects:
- NSF, Innovation Corps – National Innovation Network Teams Program, I-Corps: Wheelchair Mounted Robotic Assistive Arm (WMR2A), NSF Award #1848912, 09/25/18 – 08/31/2021.
- Connected System Institute, UWM, Building a Digital Twin of an Actuator in ANSYS and PTC ThingWorx: A step toward the development of the digital twin of the CSI testbed. June 2020 – July 2021.
- UWM Discovery and Innovation Grant Award, Wearable Upper Extremity Exoskeleton Robot for Rehabilitation, July 1, 2020 to June 30, 2022
- NASA-Wisconsin Space Grant Consortium, Higher Education Incentives Grant, Introducing Coordination Control of Mobile Robots Course to UWM-ME Program, NASA Training Grant #NNX15AJ12H, 03/01/2020 – 03/31/2020.
- UWM Research Foundation- Catalyst Grant (Supported by Lynde and Harry Bradley Foundation), ‘Light Weight, Powered Hand Rehab Glove’, 08/30/2018- 02/2021.
- NSF, I-Corps: Enhancing Regional Technology Commercialization, Smart Shoulder Rehabilitation Device (SS-RED), NSF Award# 1829202 (sub-award), 10/28/19–10/27/2020.
- Fareh (PI), M.H. Rahman (External Co-I), S. Khadraoui (Co-I), M. Bettayeb (Co-I), T. Rabie (Co-I), Source of Support: University of Sharjah, UAE, Development of an Intelligent Robot System to Instruct, Demonstrate, and Supervise Upper-Extremity Rehabilitation Session, 10/01/2018–09/31/2021.